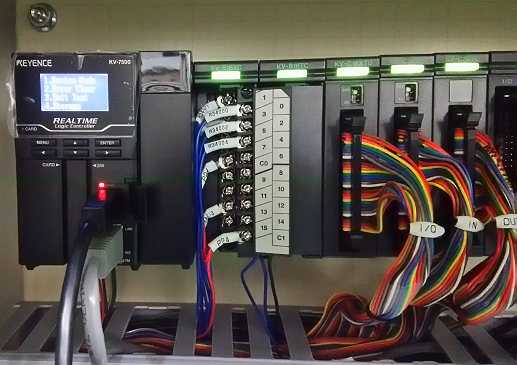
今回はキーエンスMECHATROLINK-IIIのユニットKV-XH16MLで同期の設定を紹介する。
MECHATROLINK-Ⅱでも同様の設定だ。(KV MOTION+で行う。)
なお、MECHATROLINK-Ⅱ時代のサーボ制御はhttp://sugielectric.php.xdomain.jp/plc/servo.htmlでも紹介しているので参照頂きたい。
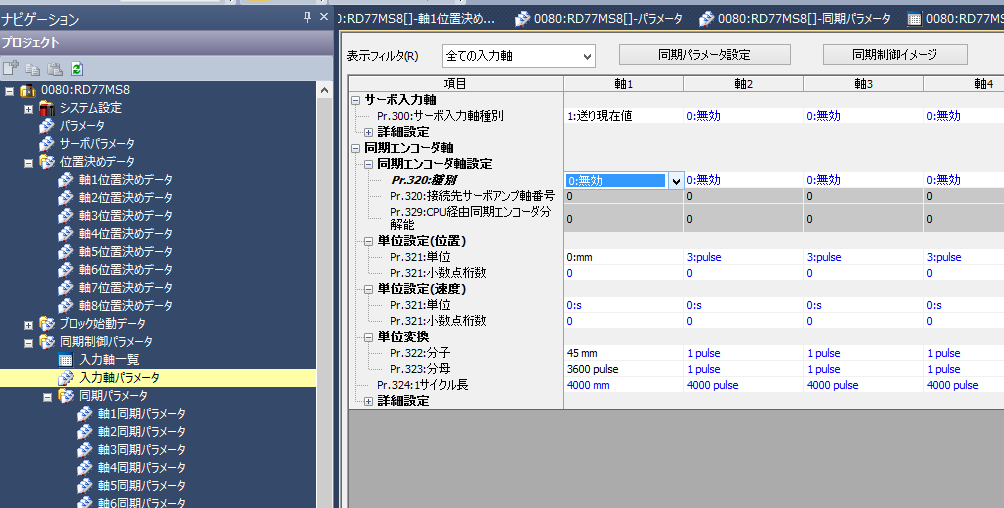
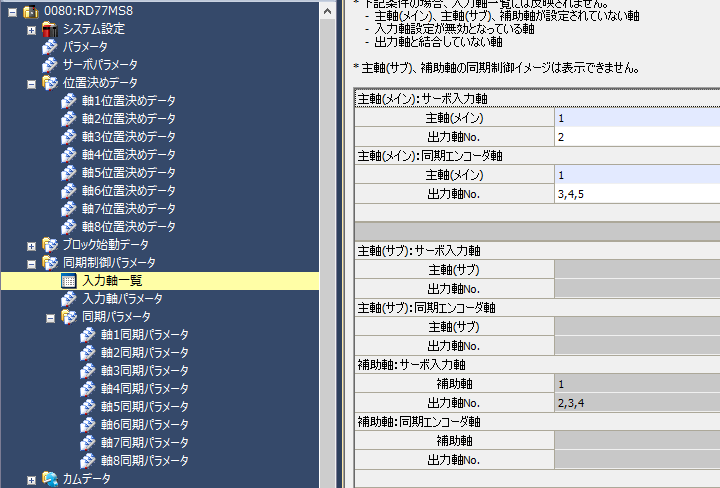
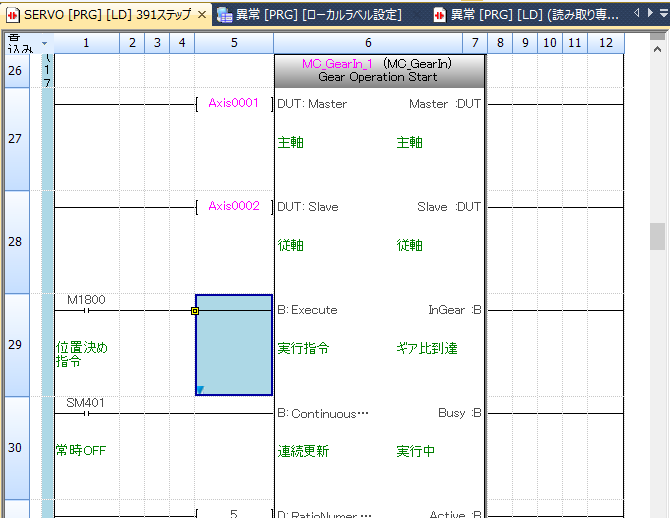
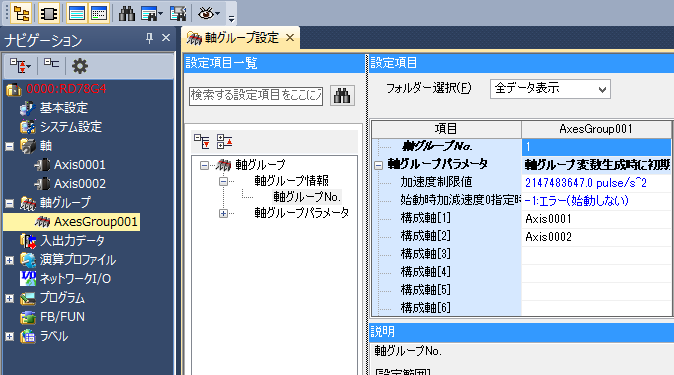
まずKV-XH16MLの「同期制御設定」の同期パラメータで主軸を設定する。※今回は主軸を軸1、従軸を軸2にする。
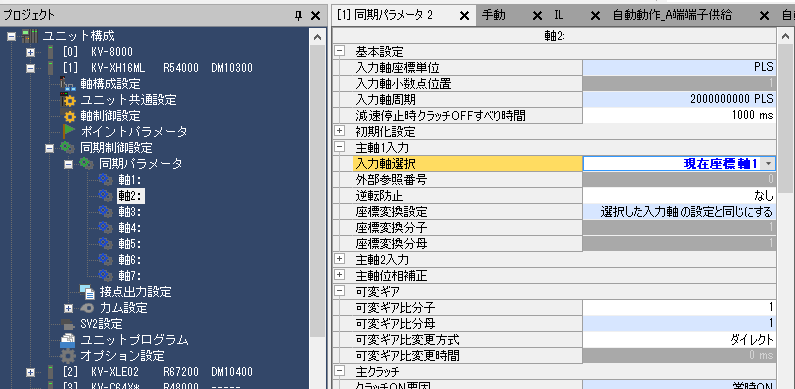
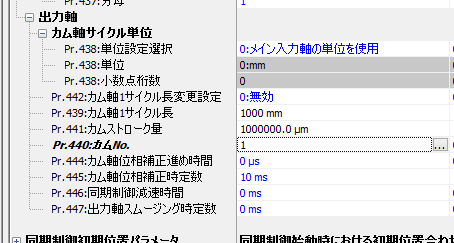
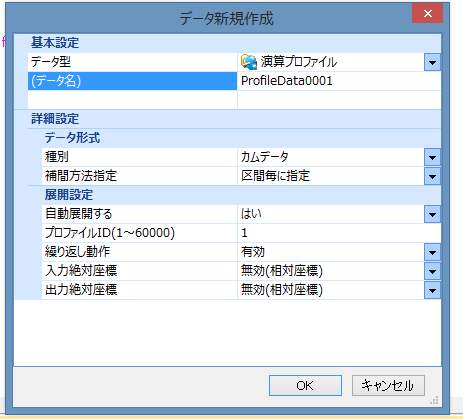
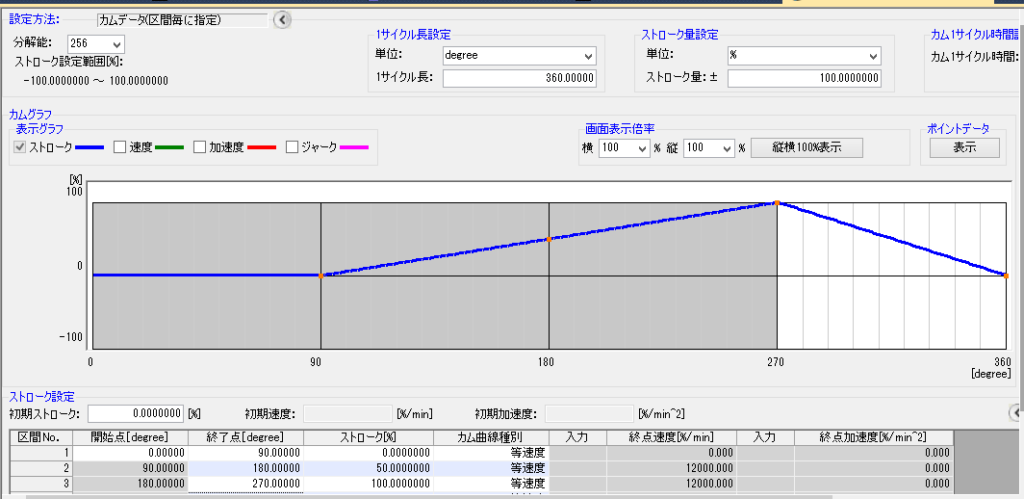
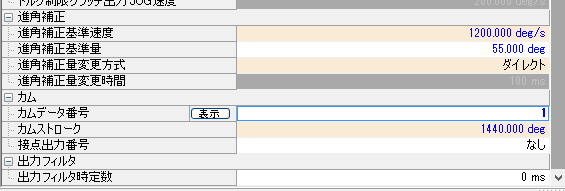
カムや進角補正もここで設定可能だ。
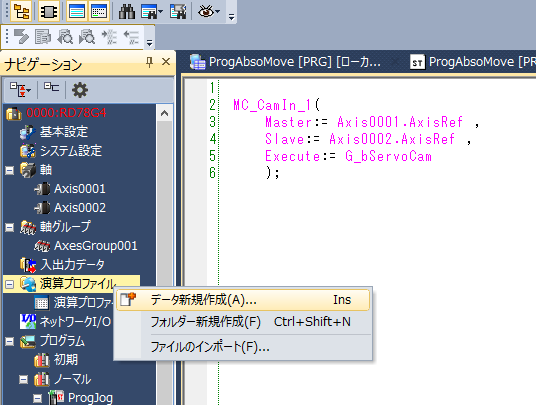
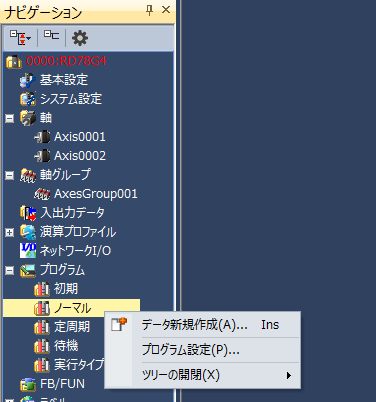
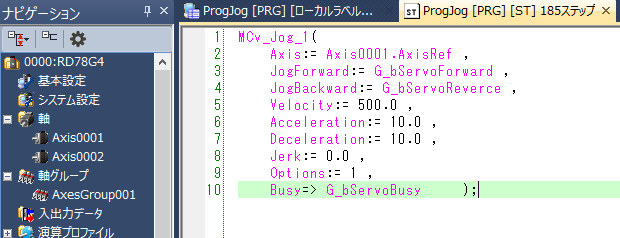
あとは各軸の主軸クラッチ指令フラグや同期制御始動フラグ(バッファメモリやリレーで割り当てられる)を操作して同期プログラムを作っていく。三菱シンプルモーションと同じだ。
一度でもモーションプログラムを一から作った経験があれば、他のメーカーのPLCや通信方式が異なっても、サーボ機能は似通っていたり同じ概念なので、最初から学習するより、学習期間が大幅に短くて済む。