三菱モーションユニットRD78G4はPLCのCPU本体のラダーとは独立してサーボプログラムをST言語で組むことができる。
CPU本体のラダースキャンに影響されないサーボ制御が出来るため、またシンプルモーションに比べプログラムが組みやすいため使われる。
ただしRD77MSではできないので、要注意だ。
まずRD78G4のユニット拡張パラメータをクリックしてモーション制御設定機能画面を立ち上げる。(※前回ブログ記事を参照。)
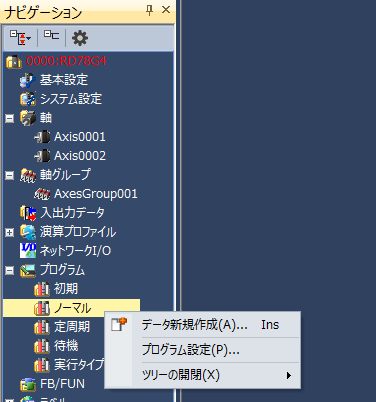
そして「プログラム」の「ノーマル」で右クリックしてデータ新規作成を行う。
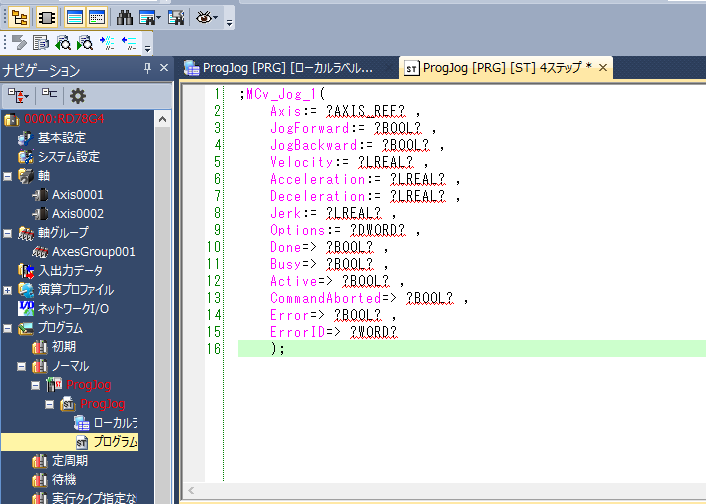
そしてファンクション部品選択からモーション制御ファンクションブロックを選択する。今回はジョグ機能をドラッグアンドドロップする。

以下ポップアップでOKする。
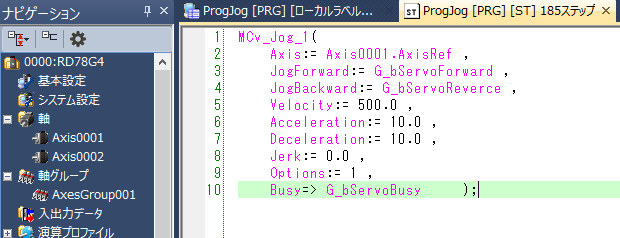
以下ST言語の関数が自動で記載されるため、引数を記載する。
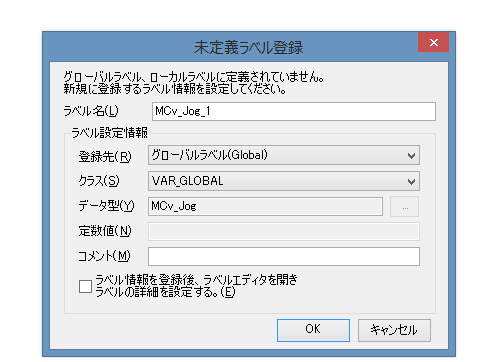
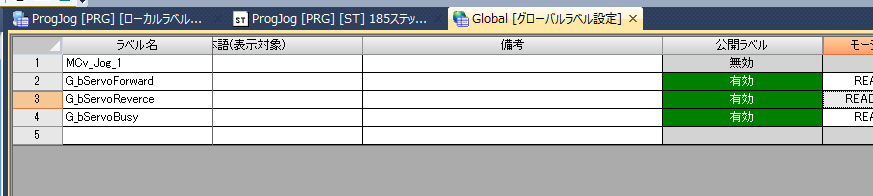
その前にグローバルラベルを設定しておく。これがラダーとの橋渡しになる。
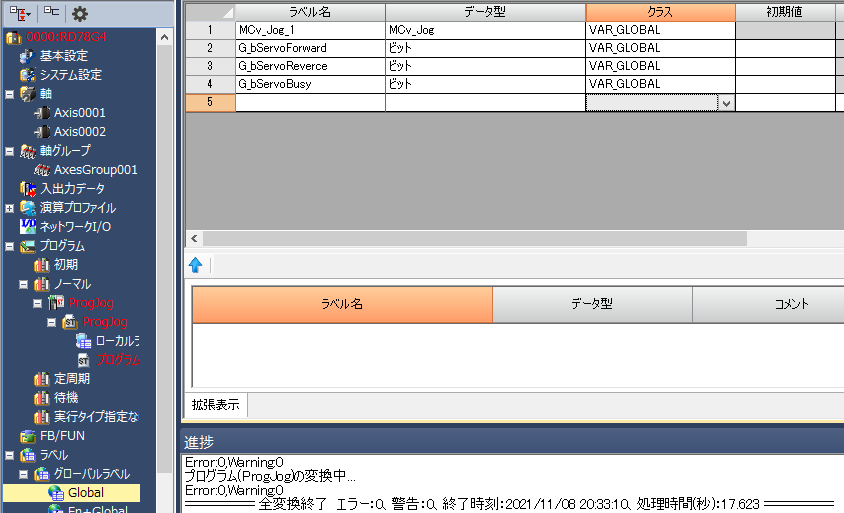
公開ラベルは有効にしておく。
そしてグローバルラベルをジョグの正転(G_bServoForward)・逆転の指令(G_bServoReverce:綴り間違いは許してね)に引数設定する。
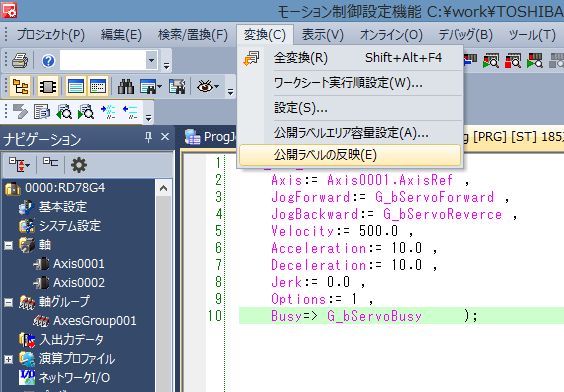
そして「全変換」を行う。

さらに「公開ラベルの反映」を行う。
後はラダー側でユニットラベルから先ほど作ったジョグ正転・逆転指令のグローバルラベルをドラッグアンドドロップしラダーのコイルにすればよい。
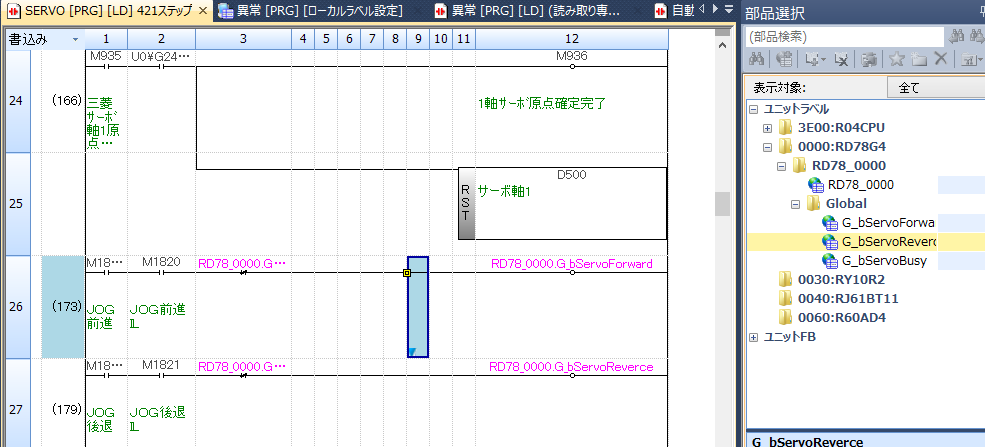
※実際の機械のインターロックに気を付けて作成してください。本サイトは動作を保証するものではありません。各自責任で参考にしてください。