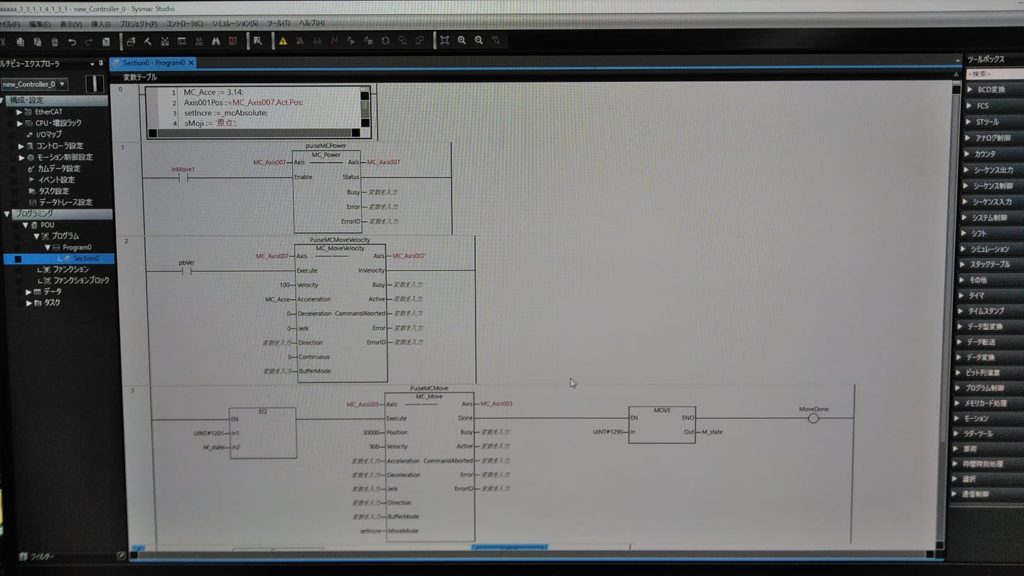
オムロンSysmacStudioはファンクションブロックとST言語とラダーを組み合わせたPLCOpenに対応したプログラムが可能。
例えばサーボはMC_Moveで位置決めができる。三菱GX Works3でも可能。
世界標準であり、シーメンス等ヨーロッパのPLCではデファクトスタンダードである。
これに慣れれば世界舞台で戦える電気制御技術者になれる。
既に筆者TakuChanは三菱・キーエンスPLCのシェアが強いアジア各国で電気制御の仕事をしてきた。
電気制御設計・施工とシステムの調和
オムロンSysmacStudioはファンクションブロックとST言語とラダーを組み合わせたPLCOpenに対応したプログラムが可能。
例えばサーボはMC_Moveで位置決めができる。三菱GX Works3でも可能。
世界標準であり、シーメンス等ヨーロッパのPLCではデファクトスタンダードである。
これに慣れれば世界舞台で戦える電気制御技術者になれる。
既に筆者TakuChanは三菱・キーエンスPLCのシェアが強いアジア各国で電気制御の仕事をしてきた。
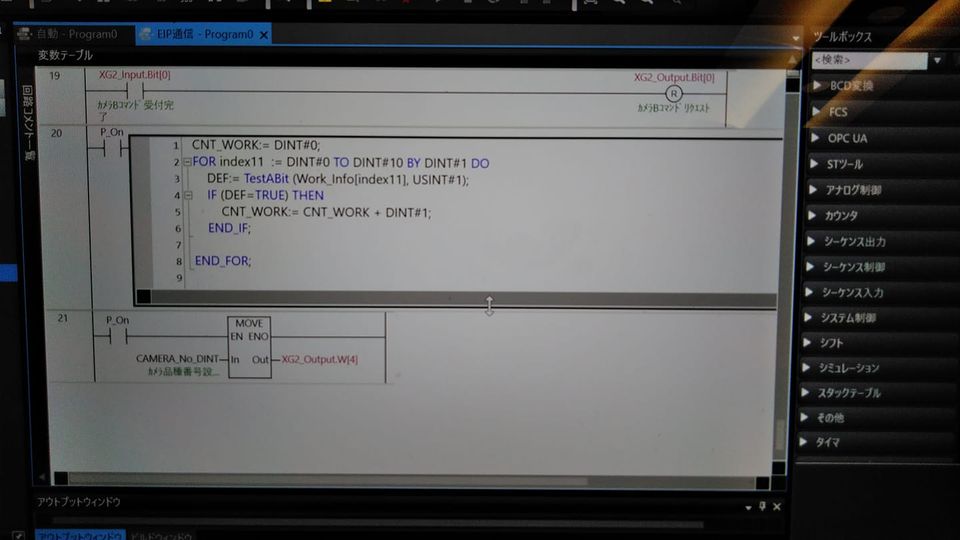
オムロンNX102でST言語。ST言語は三菱PLCと共通。
キーエンスPLCのKVスクリプトはVBとほぼ同じ文法だがST言語は違う。Pascalに近いが全然違う部分もある。慣れれば同じだけど。
モーションCPUの使い方。 ※以下、ネットやマニュアルからのメモ書き(備忘録)。 DP.SFCS H3E1 K10 ・モーションSFCプログラム起動要求命令 DP.SVST H3E1 "J1" K0 ・モーションSFCプログラムなしでサーボプログラムKを 呼ぶことができる ”J1”というのは1軸のサーボプログラムK0(SFCでのK箱)を実行。 ※ちなみにH3E1というのは、マルチCPUで使うパラメータで ・H3E0:CPUスロット(メインCPU) ・H3E1:スロット0(マルチCPU1号機) ・H3E2:スロット1(マルチCPU2号機) モーションSFC F箱(算術演算、I/O制御)、G箱(移行条件判定)、 K箱(モーション制御) を並べるだけ。 DP.SFCS H3E1 K20 M0 D0 ・立ち上がり実行 完了デバイス付き 完了デバイスを指定した場合、 受付完了でM0が1スキャンONし、 異常完了の場合はM1もONになる。 D0には完了ステータスが書き込まれる。 S.TO命令で位置決めアドレスをシーケンサCPUの 共有メモリに書く。 SP.TO H3E1 H800 D0 K10 M0 ※CPU共有メモリの800H番地にD0から10点分コピー S.TO完了後(M0立ち上がりで分かる)SP.SFCSで位置決め用SFC起動。 モーションSFCのF箱でMULTR命令を使ってS.TOで かかれたデータをモーションコントローラの デバイスにコピーしてからサーボプログラム始動。
https://www.mitsubishielectric.co.jp/.../motio.../point.html
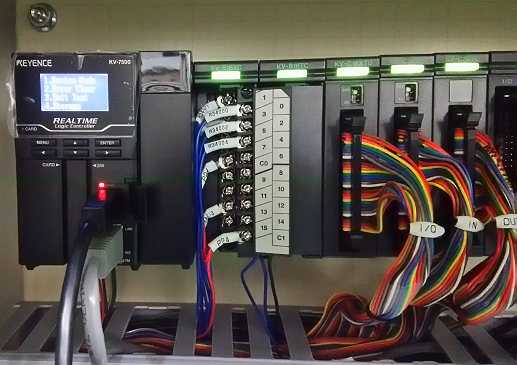
CCLINK-IEでサーボ制御するMR-J4GF。 LANケーブルで配線できるし、 QD77GFやRD77GFは他のCCLINK-IE機器もつなげるので、 ハード的には便利だが、 SSCNETに比べサーボパラメータの変更が GX-WORKSからできないので不便。

三菱PLCの特殊ユニットの端子配列はどうして、こんなに間違えやすい配置なの?
工事するとき多くの人が間違うので、エクセルで色分けして工事用に資料作り。

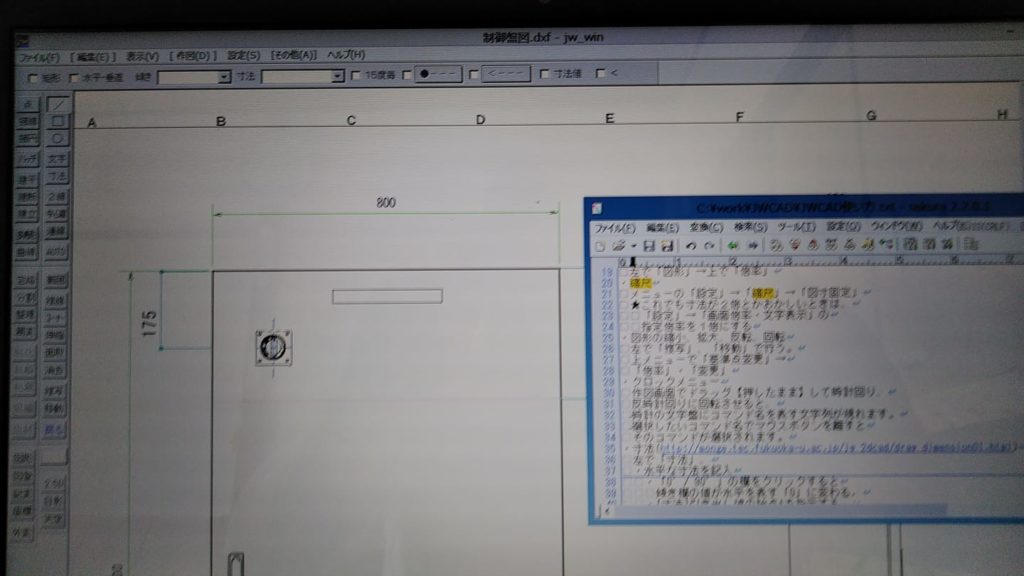
家ではJW-CADで遊ぶ。だいぶ使いこなれてきた。
仕事用のECADに比べ機能は劣るが、以下メリットもある。
・ライセンスフリーなので、初期費用や固定費ゼロ。
・dxfファイル提出編集がスムーズに行える。
・多くの企業や官公庁で使われているAutoCADの共有編集も行える。
・メジャーなCADなので、本やネット情報が豊富で潰しがきく。
個人でやる人にはオススメ。
杉本電気システムソリューションがWordPressを始めました 。